Projektarbeit von Moritz Ullmann
3D-Druck der Räder
Da mein Team und ich uns dafür entschieden haben, dass wir die kleinen Motoren in unseren Roboter einbauen, standen wir vor dem Problem mit den Rädern. Die Metallräder, die es schon gab, waren für Motoren mit 4 mm dicken Achsen ausgelegt. Die kleinen Motoren hatten aber nur eine Achsendicke von 3mm. Daher haben wir im Team überlegt, wie wir das Problem lösen können. Wir haben uns dafür entschieden die Räder am 3D-Drucker auszudrucken.
Daraufhin habe ich mir ein Metallrad genommen und geschaut wie dieses aussieht und aufgebaut ist. Das Rad für den 3D-Druck habe ich dann mit OpenSCAD designt. Das Rad besteht aus zwei Hälften, von denen ich nur eine designen musste, da das andere Teil aus Acryl in ausreichenden Mengen vorhanden war.
Abbildung 1
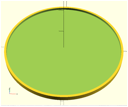 Für
das Teil, was wir benötigten, habe ich zunächst einen Zylinder mit der Höhe von
2 mm und dem Durchmesser von 45 mm entworfen. Anschließend habe ich, um die
Kerbe für den Draht zu bekommen, einen Zylinder mit der Höhe von 1 mm und dem
Durchmesser von 43,4 mm von oben von dem ersten Zylinder entfernt. So ist nur
außen ein 1,6 mm dicker Ring stehen geblieben. (Abb. 1)
Für
das Teil, was wir benötigten, habe ich zunächst einen Zylinder mit der Höhe von
2 mm und dem Durchmesser von 45 mm entworfen. Anschließend habe ich, um die
Kerbe für den Draht zu bekommen, einen Zylinder mit der Höhe von 1 mm und dem
Durchmesser von 43,4 mm von oben von dem ersten Zylinder entfernt. So ist nur
außen ein 1,6 mm dicker Ring stehen geblieben. (Abb. 1)
Abbildung 2
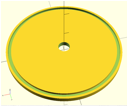 Um
jedoch nur die Kerbe zu bekommen, habe ich schließlich einen Zylinder wieder
hinzugefügt. Dieser Zylinder hat den Durchmesser von 41 mm und hat den inneren
Bereich wieder auf die Höhe von 2 mm aufgefüllt. So ist zwischen dem äußeren
Ring und dem mittleren Zylinder eine 1 mm tiefe und 1,4 mm breite Kerbe
entstanden, in die der Draht passt.
Um
jedoch nur die Kerbe zu bekommen, habe ich schließlich einen Zylinder wieder
hinzugefügt. Dieser Zylinder hat den Durchmesser von 41 mm und hat den inneren
Bereich wieder auf die Höhe von 2 mm aufgefüllt. So ist zwischen dem äußeren
Ring und dem mittleren Zylinder eine 1 mm tiefe und 1,4 mm breite Kerbe
entstanden, in die der Draht passt.
Anschließend habe ich, um das Rad überhaupt auf die Achse stecken zu können, in der Mitte des Zylinders mit Kerbe ein Loch mit dem Durchmesser von 3 mm eingefügt. (Abb. 2)
Abbildung 3
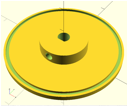 Bei
den Metallrädern ist ein weiterer Zylinder auf der Rückseite in dem ein Loch
senkrecht zum Achsloch steht, um das Rad mit einer Schraube an der Achse fest
zu drücken. Dieses Loch ist 3 mm dick, da wir 3M Madenschrauben zum Befestigen verwenden.
Diesen Zylinder habe ich auf die Seite der Kerbe gesetzt um das Rad später
besser drucken zu können. Das Loch für die Schraube habe ich natürlich
übernommen.
Bei
den Metallrädern ist ein weiterer Zylinder auf der Rückseite in dem ein Loch
senkrecht zum Achsloch steht, um das Rad mit einer Schraube an der Achse fest
zu drücken. Dieses Loch ist 3 mm dick, da wir 3M Madenschrauben zum Befestigen verwenden.
Diesen Zylinder habe ich auf die Seite der Kerbe gesetzt um das Rad später
besser drucken zu können. Das Loch für die Schraube habe ich natürlich
übernommen.
Anschließend habe ich das Loch für die Achse an der Seite des Loches für die Befestigungsschraube abgeflacht, damit das Rad auch ohne die Befestigungsschraube nicht auf der Achse gedreht werden kann. (Abb. 3)
Abbildung 4
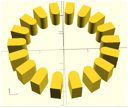 Da auf
den Draht der in die Kerbe kommt noch kleine Rädchen aufgefädelt werden müssen,
mussten auch für diese in regelmäßigen Abständen, längliche Einkerbungen sein.
Diese Einkerbungen müssen nicht nur in regelmäßigen Abständen angeordnet sein,
sondern auch um einen entsprechenden kleinen Winkel gedreht sein, damit sie
perfekt um das Rad angeordnet sind. Dafür habe ich ein Modul erstellt, das die
Auskerbung für die kleinen Rädchen um das Rad in regelmäßigen Abständen und mit
dem passenden Winkel um das Rad dreht. Das Modul für die Auskerbung, was um das
Rad rotiert, habe ich erstellt, indem ich einen Quader mit der Breite 3,8 mm,
der Länge von 5,5 mm erzeugt habe. Die Höhe des Quaders habe ich höher als erforderlich
gemacht, damit auch keine Reste stehen bleiben, wenn das Modul von dem bereits vorhanden
Radrohling entfernt wird. An die innere Seite des Quaders, habe ich einen
Da auf
den Draht der in die Kerbe kommt noch kleine Rädchen aufgefädelt werden müssen,
mussten auch für diese in regelmäßigen Abständen, längliche Einkerbungen sein.
Diese Einkerbungen müssen nicht nur in regelmäßigen Abständen angeordnet sein,
sondern auch um einen entsprechenden kleinen Winkel gedreht sein, damit sie
perfekt um das Rad angeordnet sind. Dafür habe ich ein Modul erstellt, das die
Auskerbung für die kleinen Rädchen um das Rad in regelmäßigen Abständen und mit
dem passenden Winkel um das Rad dreht. Das Modul für die Auskerbung, was um das
Rad rotiert, habe ich erstellt, indem ich einen Quader mit der Breite 3,8 mm,
der Länge von 5,5 mm erzeugt habe. Die Höhe des Quaders habe ich höher als erforderlich
gemacht, damit auch keine Reste stehen bleiben, wenn das Modul von dem bereits vorhanden
Radrohling entfernt wird. An die innere Seite des Quaders, habe ich einen  Zylinder
gesetzt, dessen Durchmesser so groß wie die Breite des Quaders ist. Dieses
Modul habe ich 18 Mal mit einem Winkel von 20° im Kreis rotieren lassen (Abb.
4). Dieses Modul habe ich dann vom Radrohling entfernt. (Abb. 5)
Zylinder
gesetzt, dessen Durchmesser so groß wie die Breite des Quaders ist. Dieses
Modul habe ich 18 Mal mit einem Winkel von 20° im Kreis rotieren lassen (Abb.
4). Dieses Modul habe ich dann vom Radrohling entfernt. (Abb. 5)
Abbildung 5 Abbildung 6
 So waren
die Kerben für den Draht und die keinen Rädchen im Rad. Dann fehlten nur noch
drei Löcher in dem mittleren Bereich zwischen den Aussparungen für die Rädchen
und dem Zylinder mit dem Achsloch. Die drei Löcher dienen dazu, das gedruckte
Rad mit den Gegenstücken aus Acryl zu verschrauben. Damit ich die drei Löcher
in gleichmäßigen Abständen platziert bekomme, habe ich dafür ein weiteres Modul
erstellt. Für dieses Modul habe ich einen Zylinder mit dem Durchmesser von 3 mm
erzeugt. Diesen Zylinder habe ich ebenfalls, wie das Modul der Aussparungen,
höher gemacht als erforderlich, damit auch dort keine Rückstände am Rad überbleiben.
Den einen Zylinder habe ich mit Hilfe des Moduls drei Mal um die Mittelachse
des Rades
So waren
die Kerben für den Draht und die keinen Rädchen im Rad. Dann fehlten nur noch
drei Löcher in dem mittleren Bereich zwischen den Aussparungen für die Rädchen
und dem Zylinder mit dem Achsloch. Die drei Löcher dienen dazu, das gedruckte
Rad mit den Gegenstücken aus Acryl zu verschrauben. Damit ich die drei Löcher
in gleichmäßigen Abständen platziert bekomme, habe ich dafür ein weiteres Modul
erstellt. Für dieses Modul habe ich einen Zylinder mit dem Durchmesser von 3 mm
erzeugt. Diesen Zylinder habe ich ebenfalls, wie das Modul der Aussparungen,
höher gemacht als erforderlich, damit auch dort keine Rückstände am Rad überbleiben.
Den einen Zylinder habe ich mit Hilfe des Moduls drei Mal um die Mittelachse
des Rades 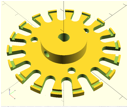 rotieren
lassen (Abb. 6). Anschließend habe ich das Modul von dem Rad entfern (Abb. 7). So
war gegeben, dass das fertig gedruckte Rad die Löcher an den gleichen Stellen
hatte, wie die drei Löcher in den Acrylgegenstücken.
rotieren
lassen (Abb. 6). Anschließend habe ich das Modul von dem Rad entfern (Abb. 7). So
war gegeben, dass das fertig gedruckte Rad die Löcher an den gleichen Stellen
hatte, wie die drei Löcher in den Acrylgegenstücken.
Abbildung 7
Als ich dachte mit dem Rad fertig zu sein, ist beim gemeinsamen
kontrollieren aufgefallen, dass es im Gegensatz zum Metallrad kein Gewinde in
dem Loch für die Befestigungsschraube ist. Wenn wir eine Schraube in das
Plastik schrauben würden und diese nur minimal zu fest festschrauben, würde das
durch die Schraube geschnittene Gewinde herausbrechen. So hätte die Schraube gar
keinen Halt mehr in dem Loch und würde das Rad auch nicht mehr an der Achse
befestigen. Daher haben wir überlegt, wie wir da Problem beheben können. Wir
haben überlegt, wie wir ein Festes Gewinde in das Loch bekommen und dann ist
uns die Idee gekommen, dass wir eine Schraubenmutter in dem mittleren Zylinder
zwischen äußerer Kante des Zylinders und der abgeflachten Seite einbringen
können. Den für die Mutter benötigten Spalt habe ich dann auch an dem OpenSCAD
Modell erstellt.
Abbildung 8
Zunächst habe ich einen Senkrechtspalt von dem Zylinder entfernt. Da
sich die Mutter in diesem Spalt drehen könnte, habe ich den Spalt so schmal
gemacht, wie eine Mutter
 an den
gegenüberliegenden Seiten breit ist. Für einen noch besseren Halt der Mutter
habe ich unten im dem Spalt einen Keil entfernt, in welchem die Mutter mit eine
Ecke genau hinein passt. So hat die Mutter in dem Spalt nach rechts und links guten
Halt, da sie nur mit der schmalen Seite hinein passt. Auch wenn sie gedreht
werden würde, wird sie mit den Ecken an den Wänden des Spalts verkanten und so ist
keine Drehung mehr
an den
gegenüberliegenden Seiten breit ist. Für einen noch besseren Halt der Mutter
habe ich unten im dem Spalt einen Keil entfernt, in welchem die Mutter mit eine
Ecke genau hinein passt. So hat die Mutter in dem Spalt nach rechts und links guten
Halt, da sie nur mit der schmalen Seite hinein passt. Auch wenn sie gedreht
werden würde, wird sie mit den Ecken an den Wänden des Spalts verkanten und so ist
keine Drehung mehr  möglich.
Nach unten hat die Mutter auch guten Halt, da die Form des Spaltes der Form der
Mutter entspricht und diese passgenau eingelegt wird. Der entfernte Spalt ist
auf Abbildung 8 zu sehen. Auf Abbildung 9 ist der Spalt in dem Rad zu sehen.
möglich.
Nach unten hat die Mutter auch guten Halt, da die Form des Spaltes der Form der
Mutter entspricht und diese passgenau eingelegt wird. Der entfernte Spalt ist
auf Abbildung 8 zu sehen. Auf Abbildung 9 ist der Spalt in dem Rad zu sehen.
Abbildung 9
Nach einer erneuten gemeinsamen Besprechung haben wir keine weiteren Probleme, die zu verbessern sind, gefunden. Schließlich haben wir das Rad dann am 3D-Drucker ausgedruckt. So war das Ergebnis:

Das Rad hat gut auf die kleinen Achsen unserer Motoren gepasst. Es hat super funktioniert und seinen Zweck erfüllt. Da es so gut funktioniert hat und stabil war sollte ich das Rad auch für Motoren mit 4 mm dicken Achsen anpassen, da es einen Mangel an Metallrädern für 4 mm Achsen gab. Ich habe dazu nur das Achsloch im Durchmesser um einen Millimeter vergrößert und den abflachenden Quader zur Stabilisierung um einen Millimeter nach außen versetzt. So konnten wir uns und den anderen Teams ausreichend Räder drucken. Wir konnten uns auch im Voraus mehrere Räder als Ersatzteile drucken. Nachdem meinem Team bei den ersten Freundschaftsspielen die kleinen Motoren durch gebrannt sind, da sie die Belastungen eines Spiels nicht ausgehalten haben, haben wir auf die größeren Motoren mit den 4 mm Achsen gewechselt. Danach brauchten wir auch die Räder mit den größeren Achslöchern.
Während der deutschen Meisterschaft in Magdeburg sind einem unserer Teams Räder kaputt gegangen. Dann haben wir auf dem Wettbewerb neue Räder gedruckt. So konnten wir die Räder des Roboters schnell und einfach reparieren.